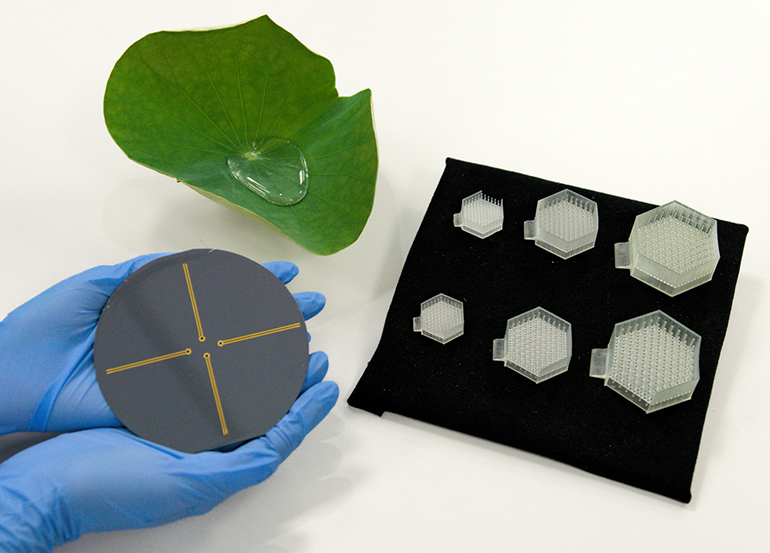

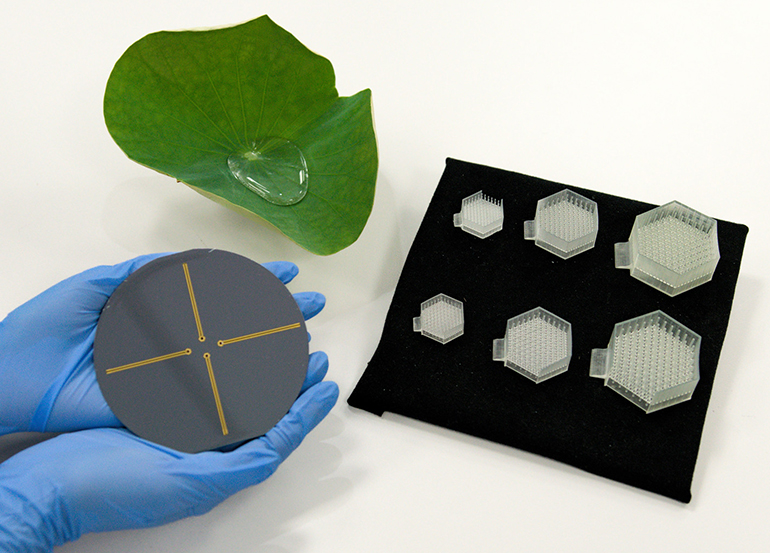
Des chercheurs de l’Université nationale de Singapour ont développé un capteur de pression hautement sensible qui peut fournir un retour haptique aux chirurgiens utilisant des outils laparoscopiques ou destiné à être utilisé dans des pinces robotisées dans le cadre de systèmes chirurgicaux robotisés. La technologie s’inspire de la surface de la feuille de lotus, extrêmement sensible à la pression exercée par de minuscules gouttes d’eau et qui va les repousser. Ce capteur est également très sensible, utilisant une couche d’air incorporée pour détecter de minuscules changements de pression et un revêtement de surface à l’intérieur pour réduire la friction. Appelés « eAir », les dispositifs peuvent également être hautement miniaturisés jusqu’à quelques millimètres seulement, ce qui les rend bien adaptés à l’inclusion dans les dispositifs laparoscopiques.
« Conduire des interventions chirurgicales avec des pinces présente des défis uniques », a déclaré Benjamin Tee, chercheur impliqué dans l’étude. « Un contrôle précis et une perception précise des forces appliquées sont essentiels, mais les outils traditionnels peuvent parfois s’avérer insuffisants, obligeant les chirurgiens à s’appuyer fortement sur l’expérience, voire sur l’intuition. L’introduction de capteurs eAir souples et facilement intégrables pourrait cependant changer la donne.
Ces chercheurs ont eu l’idée de développer un nouveau capteur de pression destiné à être utilisé en chirurgie mini-invasive et potentiellement également pour surveiller la pression intracrânienne. Les capteurs de pression conventionnels ont tendance à être volumineux, leurs mesures sont incohérentes et ils sont souvent fabriqués à partir de matériaux rigides qui inhibent leur sensibilité.
« Lorsque les chirurgiens pratiquent une chirurgie mini-invasive telle qu’une chirurgie laparoscopique ou robotique, nous pouvons contrôler les mâchoires des préhenseurs, mais nous sommes incapables de sentir ce que les effecteurs terminaux saisissent », Kaan Hung Leng, un chirurgien familier avec le système de préhension. recherche. « Par conséquent, les chirurgiens doivent s’appuyer sur notre sens de la vue et sur des années d’expérience pour porter un jugement sur les informations critiques que notre sens du toucher pourrait autrement fournir. »
L’équipe de Singapour s’est inspirée de la sensibilité des feuilles de lotus aux minuscules gouttelettes d’eau qui tombent, grâce à quoi les feuilles repoussent rapidement les gouttelettes. « Le capteur, semblable à un ‘capacitémètre’ miniature, peut détecter d’infimes changements de pression, reflétant la sensibilité d’une feuille de lotus au contact extrêmement léger d’une gouttelette d’eau », a déclaré Tee.
« Le retour haptique ou tactile fourni par les capteurs de pression intelligents a le potentiel de révolutionner le domaine de la chirurgie mini-invasive », a déclaré Hung Leng. « Par exemple, les informations indiquant si un tissu saisi est dur, ferme ou mou constituent une source d’informations supplémentaire et importante pour aider les chirurgiens à prendre des décisions prudentes lors d’une intervention chirurgicale. En fin de compte, ces avantages peropératoires ont le potentiel de se traduire par de meilleurs résultats chirurgicaux et pour les patients.
Étude dans un journal Matériaux naturels: Interface multiphasique sans friction pour une détection de pression aéro-élastique presque idéale
Via : Université nationale de Singapour