Des chercheurs de l’Université d’État de Caroline du Nord ont développé une cheville prothétique robotisée qui peut assurer la stabilité des amputés des membres inférieurs. La cheville utilise des capteurs électromyographiques placés sur les sites des muscles du membre résiduel qui transmettent alors les intentions de mouvement du porteur. Jusqu’à présent, il a été démontré que le système aide au contrôle postural, qui dans ce contexte fait référence aux nombreux mouvements complexes et inconscients que les muscles de nos jambes effectuent pour maintenir l’équilibre et nous maintenir debout, même lorsque nous sommes en grande partie immobiles. Auparavant, les amputés des membres inférieurs avaient parfois du mal à maintenir le contrôle postural, même avec des prothèses robotisées.
Parfois, même se tenir debout au même endroit nécessite un certain effort, en particulier pour les personnes amputées d’un membre inférieur. Vous n’êtes peut-être pas conscient de l’activité de vos muscles pour maintenir constamment l’équilibre et la posture, même lorsque vous êtes immobile. Cela a été difficile à recréer dans des prothèses robotiques, mais cette dernière technologie vise à aider grâce à une cheville robotique capable de surveiller l’activité musculaire du membre résiduel et de procéder à des ajustements en conséquence pour aider à maintenir l’équilibre.
« Ce travail s’est concentré sur le ‘contrôle postural’, ce qui est étonnamment compliqué », a déclaré Helen Huang, l’une des développeurs de la nouvelle technologie. « Fondamentalement, lorsque nous sommes immobiles, notre corps s’adapte constamment afin de maintenir notre stabilité. Par exemple, si quelqu’un nous heurte alors que nous faisons la queue, nos jambes effectuent une grande variété de mouvements dont nous n’avons même pas nécessairement conscience afin de nous maintenir debout. Nous travaillons avec des personnes amputées d’un membre inférieur, et elles nous disent que parvenir à ce type de stabilité avec des prothèses constitue un défi de taille. Et cette étude démontre que les chevilles prothétiques robotisées contrôlées à l’aide de signaux électromyographiques (EMG) sont exceptionnellement efficaces pour permettre aux utilisateurs d’atteindre cette stabilité naturelle.
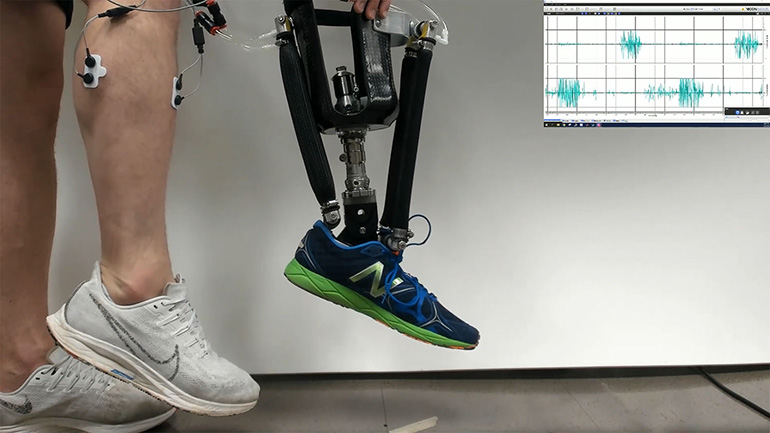
Les chercheurs ont testé leur dispositif robotique auprès de cinq volontaires ayant déjà subi une amputation d’une jambe sous le genou. « Fondamentalement, les capteurs sont placés sur les muscles au niveau du site de l’amputation », a expliqué Aaron Fleming, un autre chercheur impliqué dans l’étude. « Lorsqu’un participant à l’étude pense à déplacer le membre amputé, cela envoie des signaux électriques à travers le muscle résiduel du membre inférieur. Les capteurs captent ces signaux à travers la peau et traduisent ces signaux en commandes pour la prothèse.
Les volontaires ont ensuite été soumis à une perturbation convenue à l’avance qui pourrait perturber leur équilibre, pour voir comment la cheville robotique les aidait à maintenir leur équilibre. « Plus précisément, le prototype robotique a permis aux participants à l’étude de modifier leur stratégie de contrôle postural », a déclaré Huang. « Pour les personnes dont le membre inférieur est intact, la stabilité posturale commence au niveau de la cheville. Pour les personnes ayant perdu leur membre inférieur, elles doivent normalement compenser le manque de contrôle de la cheville. Nous avons constaté que l’utilisation de la cheville robotique qui répond aux signaux EMG permet aux utilisateurs de revenir à leur réponse instinctive pour maintenir la stabilité.
Étude dans un journal Robotique scientifique: Le contrôle des prothèses neurales rétablit une neuromécanique quasi-normative dans le contrôle postural debout
Via : Université d’État de Caroline du Nord